Micro-Mouse – Autonomous Maze-Solving Robot
Description
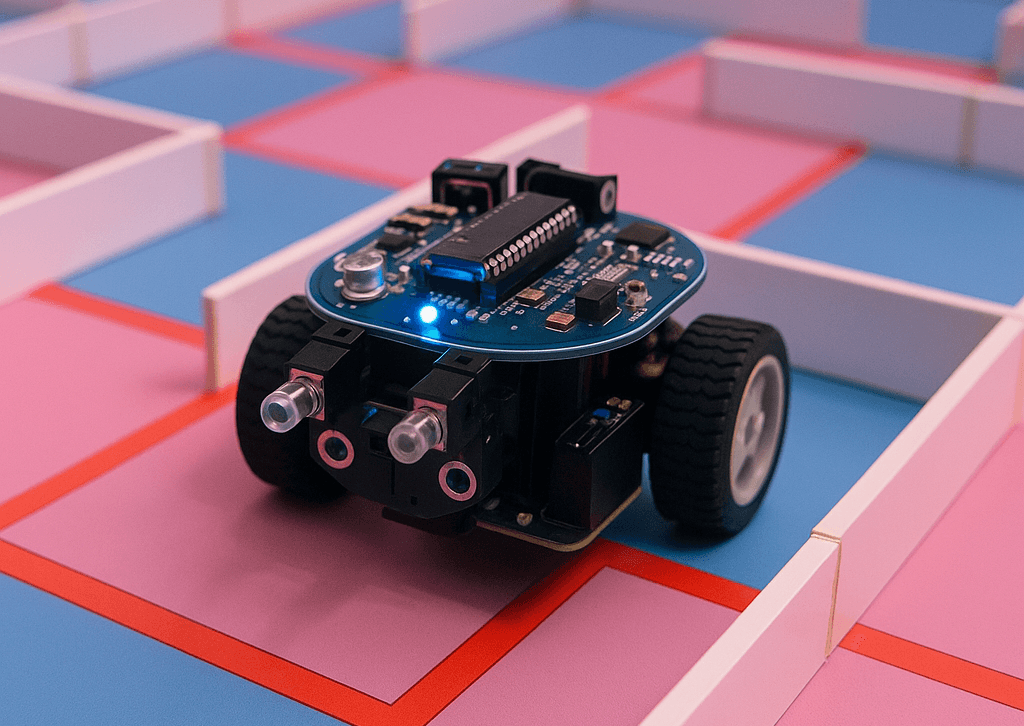
The Micro-Mouse project involved designing and implementing an autonomous robot capable of navigating and solving a maze. The robot makes use of infrared sensors for wall detection, motor drivers for motion control, and embedded algorithms to determine the optimal path to the goal.
The development process included PCB design, microcontroller programming, and algorithm testing in both simulation and physical hardware. Emphasis was placed on modular subsystem integration, with separate teams handling sensing, locomotion, and control.
This project demonstrates the application of mechatronics and embedded systems engineering to robotics, while fostering teamwork and practical problem-solving skills.
Key Skills
Embedded C Programming
PCB Design (KiCad)
Maze-Solving Algorithms